Code
#include < iostream >
#include < opencv2/opencv.hpp >
#include < math.h >
#define THRESHOLD 35000000000
#define PI 3.1416
#define SAD 0
#define SSD 1
using namespace cv;
using namespace std;
struct MotionVector
{
float vel_x;
float vel_y;
MotionVector() :vel_x(0.0),vel_y(0.0){};
};
class MotionField
{
std::vector< MotionVector > motion_field;
cv::Mat motion_field_image;
int matching_criteria;
int rows;
int cols;
public:
int height;
int width;
MotionField(int num_rows = 0, int num_cols = 0, Mat previous_frame = Mat::zeros(1,1,CV_8UC3) )
{
rows = num_rows;
cols = num_cols;
height = num_rows;
width = num_cols;
motion_field.resize(rows*cols);
motion_field_image = previous_frame.clone();
}
void set(int row, int col, const MotionVector& motion_vector)
{
if(row >= rows || row < 0)
{
cout << "Row index out of bounds of the height of motion field" << endl;
return ;
}
if(col >= cols || col < 0 )
{
cout << "Col index out of bounds of the width of motion field" << endl;
return;
}
int index = row*cols + col;
motion_field[index] = motion_vector;
}
MotionVector& get(int row, int col)
{
if(row >= rows || row < 0)
{
cout << "Row index out of bounds of the height of motion field" << endl;
row = rows-1;
}
if(col >= cols || col < 0 )
{
cout << "Col index out of bounds of the width of motion field" << endl;
col = cols-1;
}
return motion_field[row*cols+col];
}
void print(int resolution=10)
{
cout << "Printing Motion Field" << endl;
for(int j = 0; j < rows ; j+=resolution)
{
for(int i = 0; i < cols; i+=resolution)
{
MotionVector motion_vector = get(j,i);
float dx = motion_vector.vel_x;
float dy = motion_vector.vel_y;
cout << "(" << dx << "," << dy << ") ";
}
cout << endl;
}
}
void quiver(const Mat& image, int resolution)
{
float max_length = -1000;
for(int j = 0; j < rows ; j+=resolution)
for(int i = 0; i < cols; i+=resolution)
{
MotionVector motion_vector = get(j,i);
float dx = motion_vector.vel_x;
float dy = motion_vector.vel_y;
float length = sqrt(pow(dx,2)+pow(dy,2));
if(length > max_length)
max_length = length;
}
for(int j = 0; j < rows ; j+=resolution)
for(int i = 0; i < cols; i+=resolution)
{
MotionVector motion_vector = get(j,i);
float dx = motion_vector.vel_x;
float dy = motion_vector.vel_y;
cv::Point p1(i,j);
float length = sqrt(pow(dx,2)+pow(dy,2));
if(length > 0)
{
float arrow_size = 5.0*length/max_length;
cv::Point p2((int)(p1.x+dx),(int)(p1.y+dy));
arrowedLine(image,p1,p2,CV_RGB(0,255,0),1,CV_AA,0,0.2);
}
else
{
circle( image, Point( i, j ), 0.2, Scalar(0,255,0), 0.1, 8, 0 );
}
}
}
std::vector getMotionField()
{
return motion_field;
}
Mat getImage(int resolution=10)
{
quiver(motion_field_image,resolution);
return motion_field_image;
}
};
void bilinearInterpolation(Mat image, int vacant_pixel_value=0)
{
Vec3b vacant_pixel;
vacant_pixel[0] = vacant_pixel_value;
vacant_pixel[1] = vacant_pixel_value;
vacant_pixel[2] = vacant_pixel_value;
// Bilinear Interpolation
for(int j = 0; j < image.rows ; j++)
{
for(int i = 0; i < image.cols; i++)
{
if(image.at< Vec3b >(j, i) == vacant_pixel)
{
int count_r = i;
//get right most filled_neighbour
while( image.at< Vec3b >(j, count_r) == vacant_pixel && count_r< image.cols)
{
count_r++;
}
int count_l = i;
//get left most filled_neighbour
while( image.at< Vec3b >(j, count_l) == vacant_pixel && count_l >= 0 )
{
count_l--;
}
int count_b = j;
//get bottom most filled_neighbour
while( image.at< Vec3b >(count_b, i) == vacant_pixel && count_b < image.rows )
{
count_b++;
}
int count_t = j;
//get top most filled_neighbour
while( image.at< Vec3b >(count_t, i) == vacant_pixel && count_t >= 0 )
{
count_t--;
}
if(count_r >=image.cols)
count_r = image.cols-1;
if(count_l < 0)
count_l = 0;
if(count_b >=image.rows)
count_b = image.rows-1;
if(count_t < 0)
count_t = 0;
float left_offset = i-count_l;
float right_offset = count_r-i;
float top_offset = j-count_t;
float bottom_offset = count_b-j;
float col_offset = left_offset+right_offset;
float row_offset = top_offset+bottom_offset;
left_offset = (1-left_offset/col_offset)/2.0;
right_offset = (1-right_offset/col_offset)/2.0;
top_offset = (1-top_offset/row_offset)/2.0;
bottom_offset = (1-bottom_offset/row_offset)/2.0;
Vec3b top_pixel = image.at< Vec3b >(count_t, i);
Vec3b bottom_pixel = image.at< Vec3b >(count_b, i);
Vec3b right_pixel = image.at< Vec3b >(j, count_r);
Vec3b left_pixel = image.at< Vec3b >(j, count_l);
Vec3b interpolated_value;
if(left_pixel == vacant_pixel)
left_offset = 0;
if(right_pixel == vacant_pixel)
right_offset = 0;
if(top_pixel == vacant_pixel)
top_offset = 0;
if(bottom_pixel == vacant_pixel)
bottom_offset = 0;
col_offset = left_offset+right_offset;
row_offset = top_offset+bottom_offset;
left_offset = left_offset/(2*col_offset);
right_offset = right_offset/(2*col_offset);
top_offset = top_offset/(2*row_offset);
bottom_offset = bottom_offset/(2*row_offset);
interpolated_value[0] = left_offset*left_pixel[0] + right_offset*right_pixel[0] + top_offset*top_pixel[0]
+ bottom_offset*bottom_pixel[0];
interpolated_value[1] = left_offset*left_pixel[1] + right_offset*right_pixel[1] + top_offset*top_pixel[1]
+ bottom_offset*bottom_pixel[1];
interpolated_value[2] = left_offset*left_pixel[2] + right_offset*right_pixel[2] + top_offset*top_pixel[2]
+ bottom_offset*bottom_pixel[2];
image.at< Vec3b >(j, i) = interpolated_value;
}
}
}
}
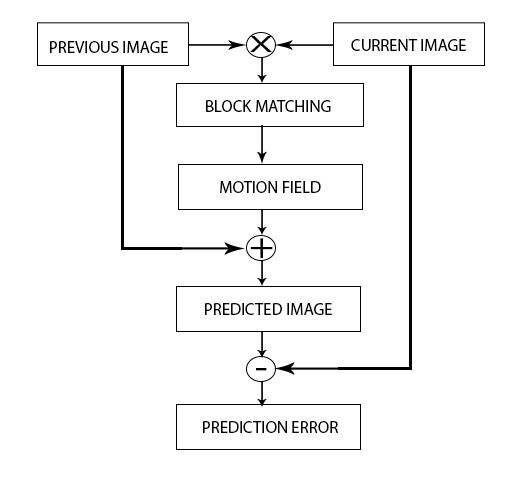
MotionField estimateMotionByBlockMatching(const Mat& previousFrame, const Mat& currentFrame,int matching_criteria = SAD, int block_size = 8, int search_window_size = 32)
{
Mat previous_frame_resized, current_frame_resized;
float width_offset = (float)currentFrame.cols/(float)block_size;
int new_width = currentFrame.cols + (cvRound(width_offset) - width_offset)*block_size;
float height_offset = (float)currentFrame.rows/(float)block_size;
int new_height = currentFrame.rows + (cvRound(height_offset) - height_offset)*block_size;
if(new_width == currentFrame.cols && new_height == currentFrame.rows )
{
previous_frame_resized = previousFrame.clone();
current_frame_resized = currentFrame.clone();
}
else
{
resize(previousFrame, previous_frame_resized, Size(new_height,new_width));
resize(currentFrame, current_frame_resized, Size(new_height,new_width));
}
Mat previous_grayscale_image = Mat::zeros( new_height, new_width, CV_8UC1 );
Mat current_grayscale_image = Mat::zeros( new_height, new_width, CV_8UC1 );
cvtColor( previous_frame_resized , previous_grayscale_image, CV_BGR2GRAY );
cvtColor( current_frame_resized , current_grayscale_image, CV_BGR2GRAY );
MotionField motion_field(new_height, new_width, previous_frame_resized);
if(search_window_size <= block_size || search_window_size%block_size != 0)
{
cout<<"Search window size must be greater than the block size and must be a multiple of block size ";
return motion_field;
}
int number_of_blocks_cols = new_width/block_size;
int number_of_blocks_rows = new_height/block_size;
cv::Mat currentFrameBlocks[number_of_blocks_rows][number_of_blocks_cols];
//Parse through each block in current image
for(int j = 0; j < number_of_blocks_rows ; j++)
{
for(int i = 0; i < number_of_blocks_cols ; i++)
{
currentFrameBlocks[j][i] = Mat::zeros( block_size, block_size, CV_8UC1 );
int start_row_index = j*block_size;
int start_col_index = i*block_size;
int stop_row_index = start_row_index +block_size;
int stop_col_index = start_col_index +block_size;
if(start_row_index < 0)
start_row_index = 0;
if(start_col_index < 0)
start_col_index = 0;
if(stop_row_index > new_height)
stop_row_index = new_height;
if(stop_col_index > new_width)
stop_col_index = new_width;
int row = 0;
int col = 0;
//Filling up each block with the values in current frame
for(int m=start_row_index; m < stop_row_index; m++)
{
col = 0;
for(int n=start_col_index ; n < stop_col_index; n++)
{
currentFrameBlocks[j][i].at(row,col) = current_grayscale_image.at(m,n);
col++;
}
row++;
}
int center_x = (start_row_index+stop_row_index)/2;
int center_y = (start_col_index+stop_col_index)/2;
// cout << "current_center x = " << center_x << " , y=" << center_y << endl;
int start_row_search_index = center_x - search_window_size/2 ;
int start_col_search_index = center_y - search_window_size/2 ;
int stop_row_search_index = center_x + search_window_size/2;
int stop_col_search_index = center_y + search_window_size/2;
if(start_row_search_index < 0)
start_row_search_index = 0;
if(start_col_search_index < 0)
start_col_search_index = 0;
if(stop_row_search_index > new_height)
stop_row_search_index = new_height;
if(stop_col_search_index > new_width)
stop_col_search_index = new_width;
float lowest_error = 10000;
MotionVector best_motion_vector;
//Parse through the search window in previous frame and find the best motion vector
for(int m=start_row_search_index; m < stop_row_search_index; m++)
{
for(int n=start_col_search_index ; n < stop_col_search_index; n++)
{
float error = 0.0;
//Compute either Sum of Squared Differences or Sum of Absolute Differences
for(int q=0; q < block_size; q++)
{
for(int r=0 ; r < block_size; r++)
{
int current_frame_pixel = currentFrameBlocks[j][i].at(q,r);
int row_index = (m+q);
int col_index = (r+n);
// if(row_index < new_height && row_index >= 0 && col_index < new_width && col_index >= 0)
// {
int previous_frame_pixel = previous_grayscale_image.at(m+q,r+n);
if(matching_criteria == SAD)
error += abs(current_frame_pixel - previous_frame_pixel);
else
error += sqrt(pow(current_frame_pixel-previous_frame_pixel,2));
//]}
}
}
int center_x_search_window = m+block_size/2;
int center_y_search_window = n+block_size/2;
if(error(j, i);
Vec3b rgb_value_2 = image_2.at< Vec3b >(j, i);
mse += abs(rgb_value_1[0]-rgb_value_2[0])^2 + abs(rgb_value_1[1]-rgb_value_2[1])^2 + abs(rgb_value_1[2]-rgb_value_2[2])^2 ;
}
return mse/(m1*n1*3.0);
}
Mat compensateMotion(Mat previous_frame, MotionField motion_field)
{
Mat previous_frame_resized;
resize(previous_frame, previous_frame_resized, Size(motion_field.width,motion_field.height));
Mat motion_compensated_image = Mat(motion_field.height, motion_field.width, CV_8UC3, Scalar(0,0,0));//Mat::zeros( motion_field.height, motion_field.width, CV_8UC3 )*-1;
for(int j = 0; j < motion_field.height ; j++)
{
for(int i = 0; i < motion_field.width; i++)
{
MotionVector motion_vector = motion_field.get(j,i);
int predicted_row = j+motion_vector.vel_y;
int predicted_col = i+motion_vector.vel_x;
if(predicted_row < motion_field.height && predicted_col= 0 && predicted_col >= 0)
motion_compensated_image.at< Vec3b >(predicted_row, predicted_col) = previous_frame_resized.at< Vec3b >(j, i);
}
}
bilinearInterpolation(motion_compensated_image,0);
return motion_compensated_image;
}
Mat compute_prediction_error(const Mat& predicted_image, const Mat& target_image)
{
Mat target_image_resized,prediction_error_image,predicted_image_grayscale;
resize(target_image, target_image_resized, predicted_image.size());
prediction_error_image = Mat::zeros(predicted_image.rows,predicted_image.cols,CV_8UC3);
for(int j = 0; j < predicted_image.rows ; j++)
{
for(int i = 0; i < predicted_image.cols; i++)
{
Vec3b target_image_pixel, predicted_image_pixel, prediction_error_pixel;
target_image_pixel = target_image_resized.at< Vec3b >(j,i);
predicted_image_pixel = predicted_image.at< Vec3b >(j,i);
prediction_error_image.at< Vec3b >(j,i) = target_image_pixel - predicted_image_pixel;
}
}
return prediction_error_image;
}
int main(int argc, char** argv )
{
Mat grayscale_image1, grayscale_image2;
Mat foreman_images[10],football_images[3];
std::ostringstream foreman_source, football_source;
MotionField foreman_motion_fields[9],football_motion_fields[3];
Mat foreman_motion_estimated_images[9],football_motion_estimated_images[3];
Mat foreman_motion_compensated_images[9],football_motion_compensated_images[3];
Mat foreman_prediction_error_images[9],football_prediction_error_images[3];
for(int i=0;i<10;i++)
{
foreman_source.str("");
foreman_source.clear();
foreman_source << "../images/foreman/fm000" << i+1 << ".tif";
foreman_images[i] = imread(foreman_source.str(),1);
if(!foreman_images[i].data)
{
cout << "No image data =" << foreman_source.str();
break;
}
if(i>=1)
{
std::ostringstream foreman_estimation_result,foreman_compensation_result,foreman_prediction_result, mse_str;
foreman_estimation_result << "../results/motion_estimation/foreman/sad/8X32/estimated_motion_field_" << i << "_8_32.jpg";
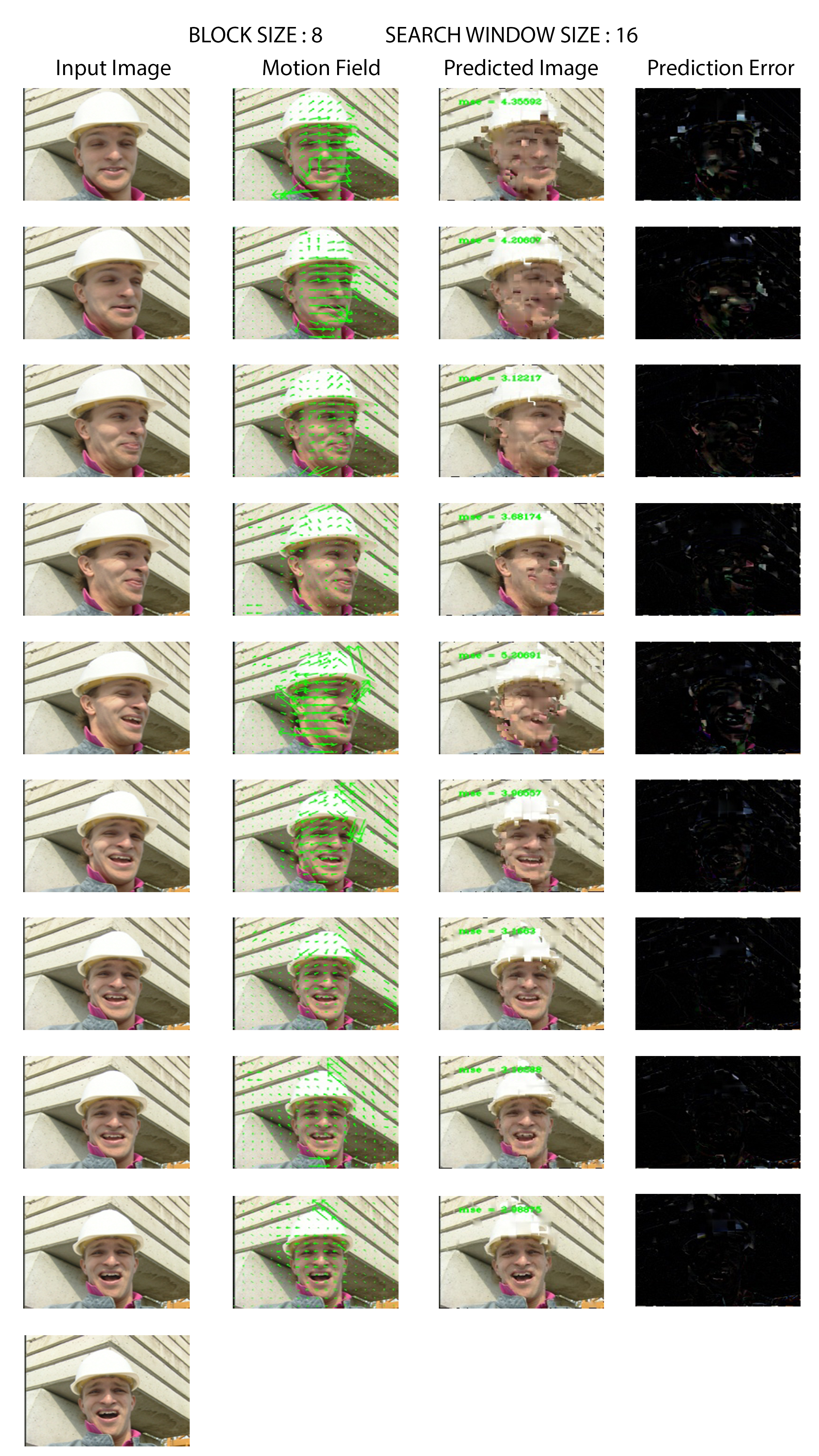
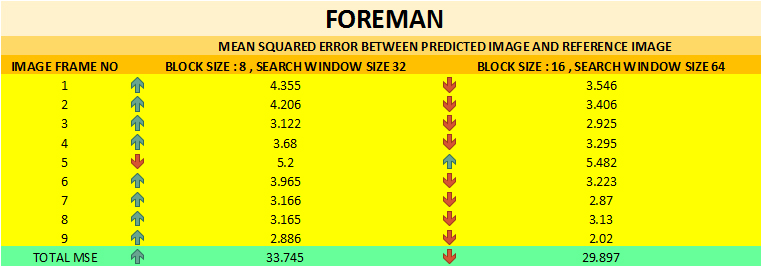
foreman_motion_fields[i-1]=estimateMotionByBlockMatching(foreman_images[i-1],foreman_images[i],SAD,8,32);
foreman_motion_estimated_images[i-1] = foreman_motion_fields[i-1].getImage();
imwrite(foreman_estimation_result.str(),foreman_motion_estimated_images[i-1]);
foreman_compensation_result << "../results/motion_compensation/foreman/sad/8X32/motion_compensated_image_" << i <<"_8_32.jpg";
foreman_motion_compensated_images[i-1]=compensateMotion(foreman_images[i-1],foreman_motion_fields[i-1]);
foreman_prediction_error_images[i-1]=compute_prediction_error(foreman_motion_compensated_images[i-1],foreman_images[i]);
float mse = mean_squared_error(foreman_motion_compensated_images[i-1], foreman_images[i]);
mse_str << "mse = " << mse;
putText(foreman_motion_compensated_images[i-1], mse_str.str(), cvPoint(20,20),
FONT_HERSHEY_COMPLEX_SMALL, 0.5, cvScalar(0,255,0), 1, CV_AA);
imwrite(foreman_compensation_result.str(),foreman_motion_compensated_images[i-1]);
foreman_prediction_result << "../results/motion_compensation/foreman/sad/8X32/prediction_error_image_" << i << "_8_32.jpg";
imwrite(foreman_prediction_result.str(),foreman_prediction_error_images[i-1]);
foreman_estimation_result.str("");
foreman_estimation_result.clear();
foreman_compensation_result.str("");
foreman_compensation_result.clear();
foreman_prediction_result.str("");
foreman_prediction_result.clear();
mse_str.str("");
mse_str.clear();
foreman_estimation_result << "../results/motion_estimation/foreman/sad/16X64/estimated_motion_field_" << i << "_16_64.jpg";
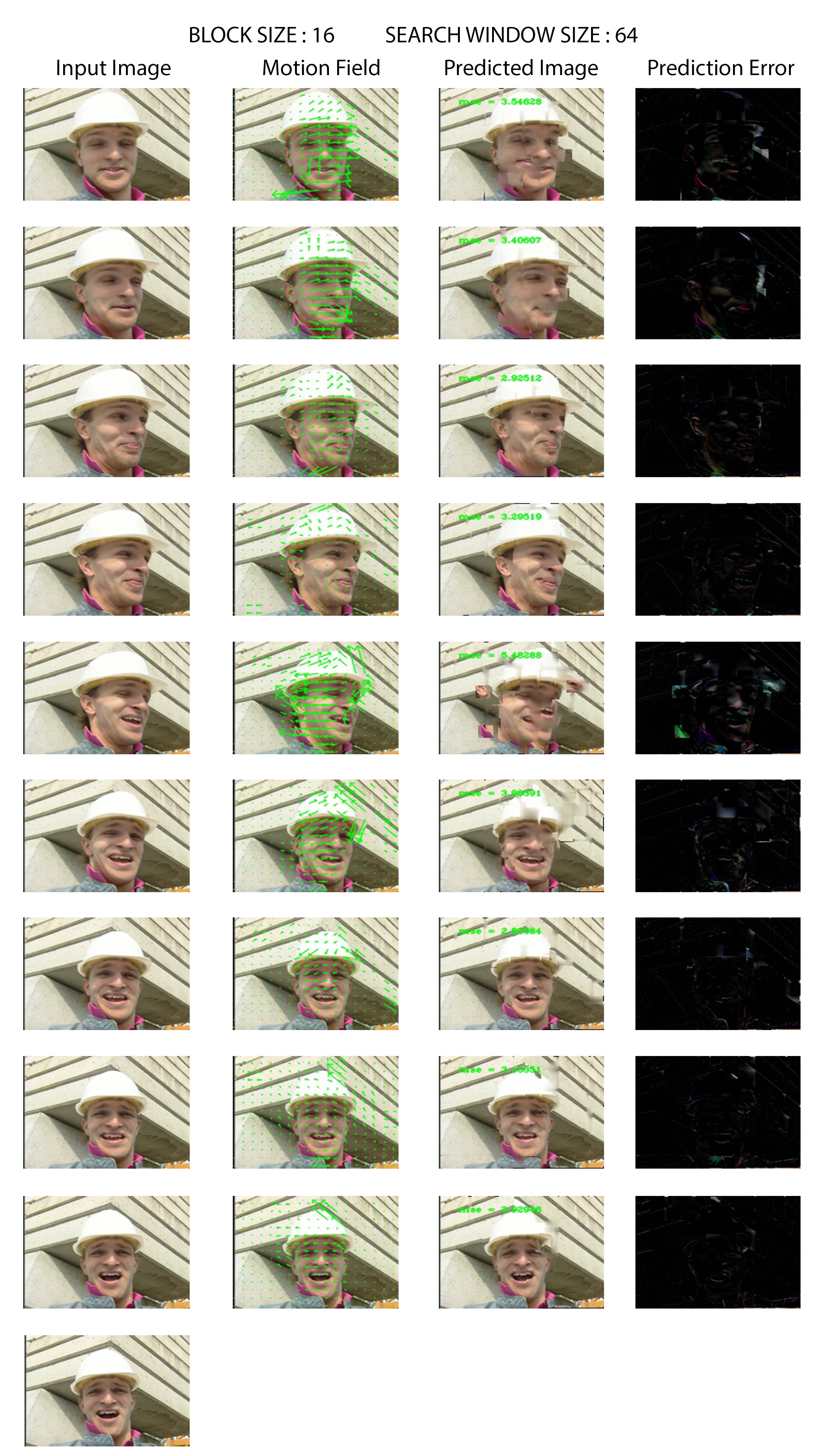
foreman_motion_fields[i-1]=estimateMotionByBlockMatching(foreman_images[i-1],foreman_images[i],SAD,16,64);
foreman_motion_estimated_images[i-1] = foreman_motion_fields[i-1].getImage();
imwrite(foreman_estimation_result.str(),foreman_motion_estimated_images[i-1]);
foreman_compensation_result << "../results/motion_compensation/foreman/sad/16X64/motion_compensated_image_" << i << "_16_64.jpg";
foreman_motion_compensated_images[i-1]=compensateMotion(foreman_images[i-1],foreman_motion_fields[i-1]);
foreman_prediction_error_images[i-1]=compute_prediction_error(foreman_motion_compensated_images[i-1],foreman_images[i]);
mse = mean_squared_error(foreman_motion_compensated_images[i-1], foreman_images[i]);
mse_str << "mse = " << mse;
putText(foreman_motion_compensated_images[i-1], mse_str.str(), cvPoint(20,20),
FONT_HERSHEY_COMPLEX_SMALL, 0.5, cvScalar(0,255,0), 1, CV_AA);
imwrite(foreman_compensation_result.str(),foreman_motion_compensated_images[i-1]);
foreman_prediction_result << "../results/motion_compensation/foreman/sad/16X64/prediction_error_image_" << i << "_16_64.jpg";
imwrite(foreman_prediction_result.str(),foreman_prediction_error_images[i-1]);
foreman_estimation_result.str("");
foreman_estimation_result.clear();
foreman_compensation_result.str("");
foreman_compensation_result.clear();
foreman_prediction_result.str("");
foreman_prediction_result.clear();
mse_str.str("");
mse_str.clear();
foreman_estimation_result << "../results/motion_estimation/foreman/ssd/8X32/estimated_motion_field_" << i << "_8_32.jpg";
foreman_motion_fields[i-1]=estimateMotionByBlockMatching(foreman_images[i-1],foreman_images[i],SSD,8,32);
foreman_motion_estimated_images[i-1] = foreman_motion_fields[i-1].getImage();
imwrite(foreman_estimation_result.str(),foreman_motion_estimated_images[i-1]);
foreman_compensation_result << "../results/motion_compensation/foreman/ssd/8X32/motion_compensated_image_" << i << "_8_32.jpg";
foreman_motion_compensated_images[i-1]=compensateMotion(foreman_images[i-1],foreman_motion_fields[i-1]);
foreman_prediction_error_images[i-1]=compute_prediction_error(foreman_motion_compensated_images[i-1],foreman_images[i]);
mse = mean_squared_error(foreman_motion_compensated_images[i-1], foreman_images[i]);
mse_str << "mse = " << mse;
putText(foreman_motion_compensated_images[i-1], mse_str.str(), cvPoint(20,20),
FONT_HERSHEY_COMPLEX_SMALL, 0.5, cvScalar(0,255,0), 1, CV_AA);
imwrite(foreman_compensation_result.str(),foreman_motion_compensated_images[i-1]);
foreman_prediction_result << "../results/motion_compensation/foreman/ssd/8X32/prediction_error_image_" << i << "_8_32.jpg";
imwrite(foreman_prediction_result.str(),foreman_prediction_error_images[i-1]);
foreman_estimation_result.str("");
foreman_estimation_result.clear();
foreman_compensation_result.str("");
foreman_compensation_result.clear();
foreman_prediction_result.str("");
foreman_prediction_result.clear();
mse_str.str("");
mse_str.clear();
foreman_estimation_result << "../results/motion_estimation/foreman/ssd/16X64/estimated_motion_field_" << i << "_16_64.jpg";
foreman_motion_fields[i-1]=estimateMotionByBlockMatching(foreman_images[i-1],foreman_images[i],SSD,16,64);
foreman_motion_estimated_images[i-1] = foreman_motion_fields[i-1].getImage();
imwrite(foreman_estimation_result.str(),foreman_motion_estimated_images[i-1]);
foreman_compensation_result <<"../results/motion_compensation/foreman/ssd/16X64/motion_compensated_image_" << i << "_16_64.jpg";
foreman_motion_compensated_images[i-1]=compensateMotion(foreman_images[i-1],foreman_motion_fields[i-1]);
foreman_prediction_error_images[i-1]=compute_prediction_error(foreman_motion_compensated_images[i-1],foreman_images[i]);
mse = mean_squared_error(foreman_motion_compensated_images[i-1], foreman_images[i]);
mse_str << "mse = " << mse;
putText(foreman_motion_compensated_images[i-1], mse_str.str(), cvPoint(20,20),
FONT_HERSHEY_COMPLEX_SMALL, 0.5, cvScalar(0,255,0), 1, CV_AA);
imwrite(foreman_compensation_result.str(),foreman_motion_compensated_images[i-1]);
foreman_prediction_result << "../results/motion_compensation/foreman/ssd/16X64/prediction_error_image_" << i << "_16_64.jpg";
imwrite(foreman_prediction_result.str(),foreman_prediction_error_images[i-1]);
}
}
for(int i=0;i<3;i++)
{
football_source.str("");
football_source.clear();
football_source << "../images/football/football_qcif_" << i+1 << ".bmp";
football_images[i] = imread(football_source.str(),1);
if(!football_images[i].data)
{
cout << "No image data =" << football_source.str();
break;
}
if(i>=1)
{
std::ostringstream football_estimation_result,football_compensation_result,football_prediction_result, mse_str;
football_estimation_result << "../results/motion_estimation/football/sad/8X32/estimated_motion_field_" << i << "_8_32.jpg";
football_motion_fields[i-1]=estimateMotionByBlockMatching(football_images[i-1],football_images[i],SAD,8,32);
football_motion_estimated_images[i-1] = football_motion_fields[i-1].getImage();
imwrite(football_estimation_result.str(),football_motion_estimated_images[i-1]);
football_compensation_result << "../results/motion_compensation/football/sad/8X32/motion_compensated_image_" << i << "_8_32.jpg";
football_motion_compensated_images[i-1]=compensateMotion(football_images[i-1],football_motion_fields[i-1]);
football_prediction_error_images[i-1]=compute_prediction_error(football_motion_compensated_images[i-1],football_images[i]);
float mse = mean_squared_error(football_motion_compensated_images[i-1], football_images[i]);
mse_str << "mse = " << mse;
putText(football_motion_compensated_images[i-1], mse_str.str(), cvPoint(20,20),
FONT_HERSHEY_COMPLEX_SMALL, 0.5, cvScalar(0,255,0), 1, CV_AA);
imwrite(football_compensation_result.str(),football_motion_compensated_images[i-1]);
football_prediction_result << "../results/motion_compensation/football/sad/8X32/prediction_error_image_" << i << "_8_32.jpg";
imwrite(football_prediction_result.str(),football_prediction_error_images[i-1]);
football_estimation_result.str("");
football_estimation_result.clear();
football_compensation_result.str("");
football_compensation_result.clear();
football_prediction_result.str("");
football_prediction_result.clear();
mse_str.str("");
mse_str.clear();
football_estimation_result << "../results/motion_estimation/football/sad/16X64/estimated_motion_field_" << i << "_16_64.jpg";
football_motion_fields[i-1]=estimateMotionByBlockMatching(football_images[i-1],football_images[i],SAD,16,64);
football_motion_estimated_images[i-1] = football_motion_fields[i-1].getImage();
imwrite(football_estimation_result.str(),football_motion_estimated_images[i-1]);
football_compensation_result << "../results/motion_compensation/football/sad/16X64/motion_compensated_image_" << i << "_16_64.jpg";
football_motion_compensated_images[i-1]=compensateMotion(football_images[i-1],football_motion_fields[i-1]);
football_prediction_error_images[i-1]=compute_prediction_error(football_motion_compensated_images[i-1],football_images[i]);
mse = mean_squared_error(football_motion_compensated_images[i-1], football_images[i]);
mse_str << "mse = " << mse;
putText(football_motion_compensated_images[i-1], mse_str.str(), cvPoint(20,20),
FONT_HERSHEY_COMPLEX_SMALL, 0.5, cvScalar(0,255,0), 1, CV_AA);
imwrite(football_compensation_result.str(),football_motion_compensated_images[i-1]);
football_prediction_result << "../results/motion_compensation/football/sad/16X64/prediction_error_image_" << i << "_16_64.jpg";
imwrite(football_prediction_result.str(),football_prediction_error_images[i-1]);
football_estimation_result.str("");
football_estimation_result.clear();
football_compensation_result.str("");
football_compensation_result.clear();
football_prediction_result.str("");
football_prediction_result.clear();
mse_str.str("");
mse_str.clear();
football_estimation_result << "../results/motion_estimation/football/ssd/8X32/estimated_motion_field_" << i << "_8_32.jpg";
football_motion_fields[i-1]=estimateMotionByBlockMatching(football_images[i-1],football_images[i],SSD,8,32);
football_motion_estimated_images[i-1] = football_motion_fields[i-1].getImage();
imwrite(football_estimation_result.str(),football_motion_estimated_images[i-1]);
football_compensation_result << "../results/motion_compensation/football/ssd/8X32/motion_compensated_image_" << i << "_8_32.jpg";
football_motion_compensated_images[i-1]=compensateMotion(football_images[i-1],football_motion_fields[i-1]);
football_prediction_error_images[i-1]=compute_prediction_error(football_motion_compensated_images[i-1],football_images[i]);
mse = mean_squared_error(football_motion_compensated_images[i-1], football_images[i]);
mse_str << "mse = " << mse;
putText(football_motion_compensated_images[i-1], mse_str.str(), cvPoint(20,20),
FONT_HERSHEY_COMPLEX_SMALL, 0.5, cvScalar(0,255,0), 1, CV_AA);
imwrite(football_compensation_result.str(),football_motion_compensated_images[i-1]);
football_prediction_result << "../results/motion_compensation/football/ssd/8X32/prediction_error_image_" << i << "_8_32.jpg";
imwrite(football_prediction_result.str(),football_prediction_error_images[i-1]);
football_estimation_result.str("");
football_estimation_result.clear();
football_compensation_result.str("");
football_compensation_result.clear();
football_prediction_result.str("");
football_prediction_result.clear();
mse_str.str("");
mse_str.clear();
football_estimation_result << "../results/motion_estimation/football/ssd/16X64/estimated_motion_field_" << i << "_16_64.jpg";
football_motion_fields[i-1]=estimateMotionByBlockMatching(football_images[i-1],football_images[i],SSD,16,64);
football_motion_estimated_images[i-1] = football_motion_fields[i-1].getImage();
imwrite(football_estimation_result.str(),football_motion_estimated_images[i-1]);
football_compensation_result << "../results/motion_compensation/football/ssd/16X64/motion_compensated_image_" << i << "_16_64.jpg";
football_motion_compensated_images[i-1]=compensateMotion(football_images[i-1],football_motion_fields[i-1]);
football_prediction_error_images[i-1]=compute_prediction_error(football_motion_compensated_images[i-1],football_images[i]);
mse = mean_squared_error(football_motion_compensated_images[i-1], football_images[i]);
mse_str << "mse = " << mse;
putText(football_motion_compensated_images[i-1], mse_str.str(), cvPoint(20,20),
FONT_HERSHEY_COMPLEX_SMALL, 0.5, cvScalar(0,255,0), 1, CV_AA);
imwrite(football_compensation_result.str(),football_motion_compensated_images[i-1]);
football_prediction_result << "../results/motion_compensation/football/ssd/16X64/prediction_error_image_" << i << "_16_64.jpg";
imwrite(football_prediction_result.str(),football_prediction_error_images[i-1]);
}
}
waitKey(0);
return 0;
}